Jan 2024 - Jul 2024
Mechanical Engineering Student Assistant at Purdue University
" The Self-Driving Car Student Competition invites students worldwide to develop critical problem-solving skills in real-time feedback control systems through tasks like circuit completion, accurate driving, and obstacle avoidance "

Object Generation
in Virtual Environment

Developed an algorithm in VS Code that generates spawnable actors, including crosswalks, traffic lights,
and people, within the virtual environment of Quanser's Interactive Labs software.

By utilizing Ultralytics's YOLOv8 computer vision model,
trained on our generated image data, we enabled real-time object identification from
the virtual camera. Additionally, the bounding boxes created for object identification
enable the calculation of the distance from the camera to the object.

Developed code that integrates a lane detection function to navigate the QCar within lane boundaries.
By utilizing a distance function, the code determines when the QCar should turn, as well as the
appropriate speed and angle for each turn.
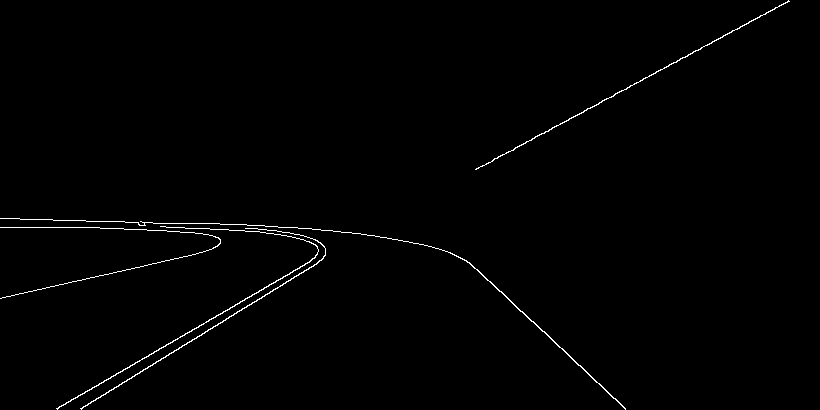
Developed Python code utilizing the Laplace transform to enhance generated road images by creating
a clear outline of the road. This process involves using the second derivative to sharpen the image,
thereby increasing the contrast between the edges of the roads and the adjacent pixels.